The last two sections have introduced some basic algebraic operations and useful geometric interpretations for vector addition, scalar multiplication, and the dot product. In this section, we will define and explore the cross product, another algebraic operation which measures useful geometric information related to pairs of vectors in \(\R^3\text{.}\)
Remember that we use a right-handed coordinate system, as described in Section 9.1. In particular, recall that the vectors \(\vi\text{,}\)\(\vj\text{,}\) and \(\vk\) are oriented as shown below in Figure 9.4.1. We would like to think of a right-handed coordinate system in terms of vectors that are not just \(\vi\text{,}\)\(\vj\text{,}\) and \(\vk\text{.}\)
Three mutually-perpendicular vectors labeled \(\vi\text{,}\)\(\vj\text{,}\) and \(\vk\text{.}\) The vector \(\vj\) points to the right while \(\vk\) points up and \(\vi\) comes out of the screen.
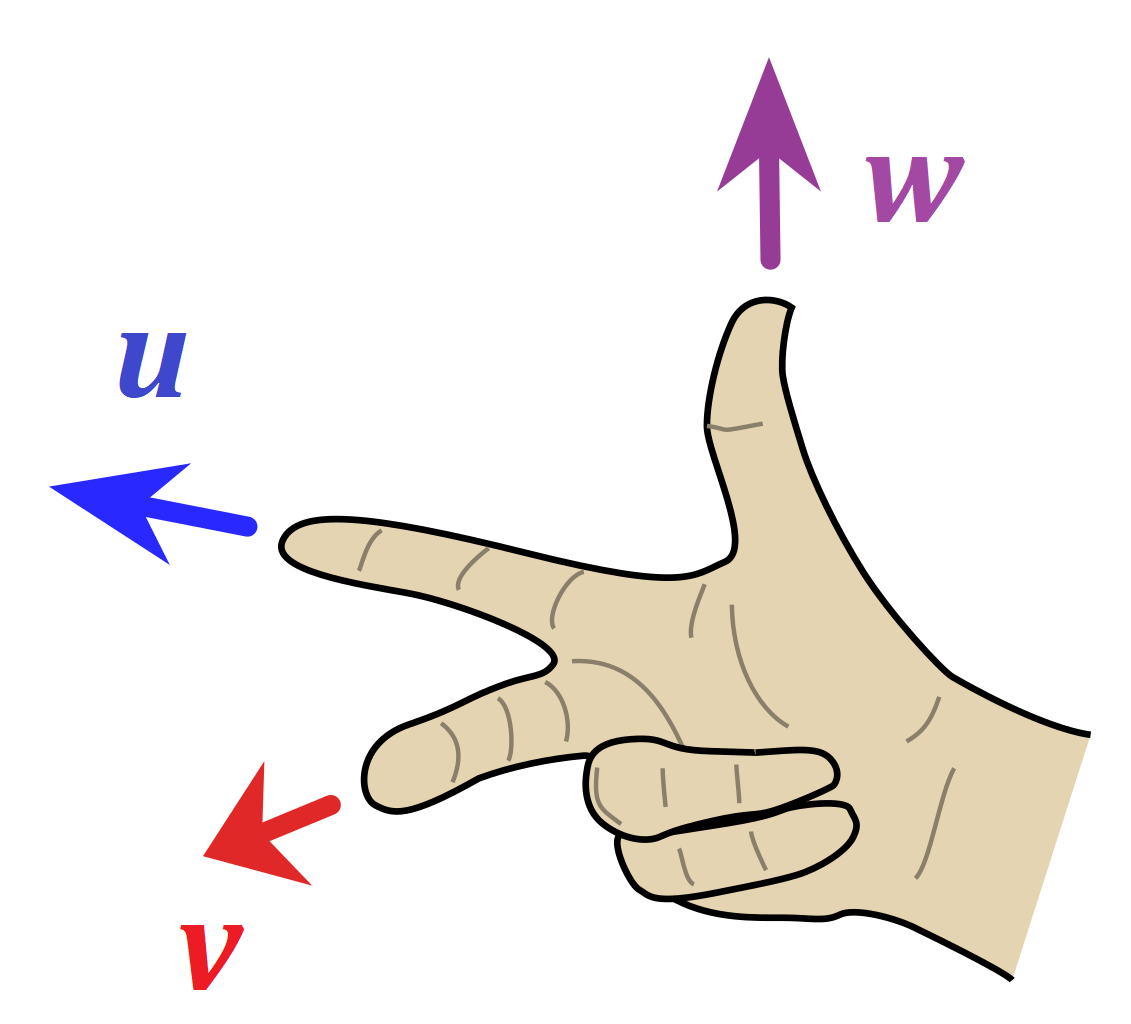
We will call an ordered list of vectors \(\{\vu, \vv, \vw\}\) a right-handed coordinate system (or right-handed orientation) provided that putting the fingers of your right hand in the direction of \(\vu\) and curling your fingers in the direction of \(\vv\) results in the thumb of your right hand pointing in the direction of \(\vw\text{.}\) Remember that to get this orientation correct, you may need to rotate your right hand to get your fingers to curl in the correct direction, which will then give you the proper direction for the third vector \(\vw\text{.}\)
A depiction of a person’s right hand with thumb, index finger, and middle finger extended. The thumb points up and is labeled \(\vw\text{.}\) The index finger points to the left and is labeled \(\vu\text{.}\) The middle finger points toward the viewer and is labeled \(\vv\text{.}\) Adapted from https://en.m.wikipedia.org/wiki/File:Right_hand_rule_cross_product.svg with credit to user KdYpUvMgT.
We would like to create a product of two vectors, which we will call the cross product, that creates a right handed coordinate system with the input vectors as the first two vectors in our coordinate system. We will denote the cross product of \(\vu\) and \(\vv\) by \(\vu \times \vv\text{.}\) If \(\vu\) and \(\vv\) are not parallel, we want the cross product of \(\vu\) with \(\vv\) to make \(\{\vu, \vv, \vu\times\vv\}\) a right-handed coordinate system. Additionally, we would like the cross product to work well with linear combinations of vectors. Specifically, we want the following algebraic property to be satisfied:
Our first task is to understand what it means to complete a right-handed coordinate system. For each of the cases below, you need to give a vector that fills in the blank to create a right-handed coordinate system. For example, the answer that would complete \(\{\vi, \vj, ???\}\) would be \(\vk\text{.}\) You should be careful to when you have vectors that are in the opposite directions of \(\vi\) or \(\vj\) or \(\vk\text{.}\)
As we said above, we would like the cross product to distribute over vector sums (\((\vv+\vu) \times \vw = (\vv \times \vw) + (\vu \times \vw)\)). Complete each of the following right-handed coordinate systems geometrically. Focus on the direction of the vector needed to complete the right-handed coordinate system and do not worry about the length of the vector you choose.
Note that \(3\vk=\vk+\vk+\vk\text{,}\) so \((3\vk) \times \vj = (\vk \times \vj) + (\vk \times \vj) + (\vk \times \vj)\text{.}\) What do you think the vector \((3\vk) \times \vj\) will be?
As we have seen in Preview Activity 9.4.1, the cross product \(\vu\times\vv\) will be defined for two vectors \(\vu\) and \(\vv\) in \(\R^3\) and produces another vector in \(\R^3\text{.}\) Using the right-hand rule, we saw that
We also want the cross product to distribute over linear combinations so that \((k \vv+\vu) \times \vw = k(\vv \times \vw) + (\vu \times \vw)\text{.}\) Using the ideas directly above, we can compute the cross product in terms of the components of general vectors. Applying these ideas of right-handed coordinate systems and the cross product working with linear combinations of vectors gives us the following:
As presented, the expression in (9.4.1) is complicated, and the variety of subscripts and minus signs may appear difficult to remember. However, we can rewrite this definition using determinants, which allows important structure to emerge. The determinant of a \(2\times2\) matrix is
\begin{equation*}
\left|
\begin{array}{cc}
a \amp b \\
c \amp d
\end{array}
\right|
=ad - bc.
\end{equation*}
We will use the definition of cross product to check some of our work from Preview Activity 9.4.1. First, we want to check a calculation like \(\vk \times \vi\) from part (a). We will write both \(\vk\) and \(\vi\) in their component forms of \(\langle 0,0,1\rangle\) and \(\langle 1,0,0\rangle\text{.}\) So \(\vk \times \vi\) will be computed as
Evaluate the dot products \(\vu\cdot(\vu\times\vv)\) and \(\vv\cdot(\vu\times\vv)\text{.}\) What does this tell you about the geometric relationship among \(\vu\text{,}\)\(\vv\text{,}\) and \(\vu\times\vv\text{?}\)
Recall that multiplication of real numbers is associative. For example, \((2\cdot 5)\cdot 3 = 2\cdot(5\cdot 3)\text{.}\) Is it true that the cross product of vectors is associative? For instance, is it true that \((\vu\times\vv)\times\vi = \vu\times(\vv\times\vi)\text{?}\)
The cross product satisfies the following properties, some of which were illustrated in Preview Activity 9.4.1 or may be verified from the definition (9.4.1).
While some of these properties may not seem natural, we need to look at these from the perspective of what we desired the cross product to measure. The result of the cross product should complete a right handed coordinate system and the cross product should work well with linear combinations by distributing across vector addition and scalar multiplication. The first property above is a consequence of the cross product being the vector needed to complete the associated right-handed coordinate system. If you switch the order of the first two vectors in our right-handed coordinate system, then the third vector must switch direction in order for the orientation to follow the right hand rule. The second and third properties are what we meant for the cross product to work well with linear combinations and can be verified algebraically from (9.4.1), and the fifth should make sense after thinking about part d of Subsection 9.4.2.
Subsection9.4.3The Vector Nature of the Cross Product
The output of the cross product is a vector and thus has both magnitude and direction. In this section, we will split up the cross product’s geometric meaning into these two fundamental properties of vectors. We will begin by first mentioning that the direction of the cross product (as defined in equation (9.4.1)) satisfies our claim in the introduction to this section.
The cross product of \(\vu\) and \(\vv\) is oriented to make \(\{\vu,\vv,\vu\times\vv\}\) a right-handed coordinate system. In particular, this means that \(\vu\times\vv\) is orthogonal to both \(\vu\) and \(\vv\text{.}\)
Remember from Preview Activity 9.4.1 that the cross product of \(\vu\) and \(\vv\) will complete the right handed coordinate system, \(\{\vu, \vv, ???\}\text{.}\) In particular, the last vector in our right handed coordinate system will be at a \(\frac{\pi}{2}\) or \(90^\circ\) angle to the other vectors because your thumb makes a \(90^\circ\) angle with the plane that your fingers can extend and curl in. We defined the cross product to satisfy the right-hand orientation relationship for \(\vi\text{,}\)\(\vj\text{,}\) and \(\vk\) (and for linear combinations of these vectors), so we need only verify the orthogonal relationship algebraically by computing \(\vu\cdot(\vu\times\vv)\text{.}\)
To summarize, we have \(\vu\cdot(\vu\times\vv) = 0\text{,}\) which implies that \(\vu\) is orthogonal to \(\vu\times\vv\text{.}\) A similar algebraic argument will show that \(\vv\) is orthogonal to \(\vu\times\vv\text{,}\) and thus the output of \(\vu\times\vv\) is a vector that is perpendicular to both input vectors, \(\vu\) and \(\vv\text{.}\) Because the cross product works well with linear combinations, \(\vu\times\vv\) is perpendicular to any linear combination of \(\vu\) and \(\vv\) (to be shown in 16).
We now look at the magnitude of \(\vu\times\vv\) in terms of the vector attributes (magnitude and direction) of the input vectors \(\vu\) and \(\vv\text{.}\)
To investigate, we will compute the square of the length \(\vecmag{\vu\times\vv}^2\) and denote by \(\theta\) the angle between \(\vu\) and \(\vv\text{,}\) as in Subsection 9.3.3. The following simplification is not intuitive, but you can find through some significant algebra that
Note that Key Idea 9.4.6 stated above implies \(\vu\times\vv = \vzero\) if \(\vu\) and \(\vv\) are parallel. If \(\vu\) and \(\vv\) are parallel, then \(\theta=0\) or \(\pi\text{.}\) Thus, equation (9.4.2) tells us that \(\sin(\theta)=0\) implies \(\vu\times\vv = \vzero\text{.}\)
Equation (9.4.2) is also related to the parallelogram formed by two vectors \(\vu\) and \(\vv\text{,}\) as shown in Figure 9.4.7. We say that \(\vw\) is the outward direction of the parallelogram formed by \(\vu\) and \(\vv\) provided that \(\vw\) is perpendicular (in \(\R^3\)) to the parallelogram and \(\{\vu,\vv,\vw\}\) has a right-handed orientation. You should now convince yourself that in Figure 9.4.7 the outward direction is coming directly out of the page (or screen). Remember that the order of our vectors matters for orientation purposes, so the outward direction for the parallelogram formed by \(\vv\) and \(\vu\) would be into the page.
The parallelogram with a horizontal segment drawn with a horizontal arrow going to the right, labeled \(\vu\) and the adjacent side drawn with an arrow that goes more up than to the right and is labeled \(\vv\text{.}\) The angle from the first arrow to the second is drawn by a circular arc and labeled \(\theta\text{.}\) A vertical line segment from the end of the second arrow down to the horizontal arrow is labeled \(\Vert\vv\Vert \sin(\theta)\text{.}\)
The magnitude of the cross product, \(\vu\times\vv= \Vert\vu\Vert\Vert\vv\Vert\sin(\theta)\text{,}\) is the area of the parallelogram defined by \(\vu\) and \(\vv\text{.}\) Additionally, \(\vu\times\vv\) is the outward direction for the parallelogram defined by \(\vu\) and \(\vv\text{.}\)
The area of a parallelogram is the product of its base and height. Based on Figure 9.4.7, we consider the base of the parallelogram to be \(\vecmag{\vu}\) and the height to be \(\vecmag{\vv}\sin(\theta)\text{.}\) This means that the area of the parallelogram formed by \(\vu\) and \(\vv\) is
If \(\vu = u_1\vi + u_2\vj + 0\vk\) and \(\vv = v_1\vi + v_2\vj + 0\vk\) are vectors in the \(xy\)-plane, then Equation (9.4.1) shows that the area of the parallelogram determined by \(\vu\) and \(\vv\) is \(\vecmag{\vu \times \vv} = \vert u_1v_2-u_2v_1 \vert\) is the absolute value of the \(2 \times 2\) determinant \(\left\vert
\begin{array}{cc}
u_1 \amp u_2 \\
v_1 \amp v_2
\end{array}
\right\vert
\text{.}\) Thus, the absolute value of a determinant of a \(2 \times 2 \) matrix is also the area of a parallelogram.
There is yet one more geometric implication we may draw from Key Idea 9.4.8. Suppose \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) are vectors in \(\R^3\) that are not coplanar. (That is, \(\vw\) is not a linear combination of \(\vu\) and \(\vv\text{.}\)) In this case, \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) define a three-dimensional solid called a parallelepiped and depicted in Figure 9.4.9.
The parallelepiped is drawn with three edges shown starting from a common point. The first arrow is labeled \(\vu\) and is changing only horizontally. The second vector moves to the right and up and is labeled \(\vv\text{.}\) The third arrow moves more up than right and is labeled \(\vw\text{.}\) A vertical line segment is drawn from the end of the third vector to the parallelogram on the bottom of the figure. This vertical segment is labeled \(h\text{.}\) A vertical arrow is drawn from the same starting point as the other three vectors and is labeled \(\vec{n}\text{.}\) The angle from the third vector to the vertical arrow is highlighted with a curved arc and labeled \(\alpha\text{.}\)
The volume of the parallelepiped is determined by multiplying the area \(A\) of the base by the height \(h\text{.}\) As we have just seen, the area of the base is \(\vecmag{\vu\times\vv}\text{.}\) Moreover, \(h=\vecmag{\vw}\cos(\alpha)\) where \(\alpha\) is the angle between \(\vw\) and the vector \(\vn\) orthogonal to the plane formed by \(\vu\) and \(\vv\text{.}\) Since \(\vn\) is parallel to \(\vu\times\vv\text{,}\) the angle between \(\vw\) and \(\vu\times\vv\) is also \(\alpha\text{.}\) This shows that
A plot with three mutually perpendicular axes labeled with x going down and left, y going to the right and z going up. The first black arrow is shown going up and to the right and is labeled \(\vv\text{.}\) A second black arrow going to the left and up and is labeled \(\vu\text{.}\)
Are the vectors \(\va = \langle 1,3,-2\rangle\text{,}\)\(\vb=\langle2,1,-4\rangle\text{,}\) and \(\vc=\langle 0, 1, 0\rangle\) in standard position coplanar? Use the concepts from this section to explain your answer.
We have seen that the cross product enables us to produce a vector perpendicular to two given vectors, to measure the area of a parallelogram, and to measure the volume of a parallelepiped. Besides these geometric applications, the cross product also enables us to describe a physical quantity called torque.
Suppose that we would like to turn a bolt using a wrench as shown in Figure 9.4.11. If a force \(\vF\) is applied to the wrench and \(\vr\) is the vector from the position on the wrench at which the force is applied to center of the bolt, we define the torque, \(\tau\text{,}\) to be
A drawing of a wrench drawn vertically with an arrow through the middle of the wrench. Another black arrow is shown moving down and left with ending point being the bottom of the wrench. The angle between these arrows is highlighted by a curved arc and labeled \(\theta\text{.}\) A horizontal segment is drawn in gray from the start of the second arrow to the middle of the wrench.
When a force is applied to an object, Newton’s Second Law tells us that the force is equal to the rate of change of the object’s linear momentum. Similarly, the torque applied to an object is equal to the rate of change of the object’s angular momentum. In other words, torque will cause the bolt to rotate.
In many industrial applications, bolts are required to be tightened using a specified torque. Of course, the magnitude of the torque is \(\vecmag{\tau} =\vecmag{\vF\times\vr} =\vecmag{\vF}\vecmag{\vr}\sin(\theta)\text{.}\) Thus, to produce a larger torque, we can increase either \(\vecmag{\vF}\) or \(\vecmag{\vr}\text{,}\) which you may know if you have ever removed lug nuts when changing a flat tire. Increasing \(\vecmag{\vF}\) means you exert more force and increasing \(\vecmag{\vr}\) means you use a longer wrench. The ancient Greek scientist and mathematician Archimedes said: “Give me a lever long enough and a fulcrum on which to place it, and I shall move the world.” A modern spin on this statement is: “Allow me to make \(\vecmag{\vr}\) large enough, and I shall produce a torque large enough to move the world.”
When opening a door, you use the knob or push bar as far from the hinge as possible. If you were to try to open a door by pushing on the middle of the door (rather than the edge farthest from the hinges), you would need to push twice as hard as normal because you have half of \(\Vert\vr\Vert\text{.}\)
In this final subsection, we practice making sense of different expressions involving vectors by describing what kind object the result will be. It is easy to get caught up in all of the manipulations of symbols and new operations and write an expression that looks reasonable but is not defined. For example, \((\vu \cdot \vv) \times \vw\) looks like a nice and reasonable calculation involving vectors (and looks a lot like a scalar triple product!). However, \((\vu \cdot \vv) \times \vw\) is undefined because the quantity in the parentheses is a scalar and you can’t take the cross product of a scalar and a vector.
In this activity, we are focused on the type of objects being used and whether the expression makes sense to do at all. We are not going to worry about interpreting or understanding what is being measured by these expressions.
For each of the expressions below, state whether the result is a scalar, a vector, or undefined. You should write a sentence or two about each to explain your reasoning. (Assume that vectors are nonzero and not orthogonal.)
Use the operations of dot product and vector subtraction to write an expression involving \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) that evaluates to a scalar. You can use other operations if you want.
Use the operations of cross product, scalar multiplication, and vector addition to write an expression involving \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) that evaluates to a vector. You can use other operations if you want.
Use the operations of dot product and vector addition to write an expression involving \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) that is undefined. You can use other operations if you want.
The cross product is defined only for vectors in \(\R^3\text{.}\) The cross product of vectors \(\vu = u_1 \vi + u_2 \vj + u_3 \vk\) and \(\vv = v_1 \vi + v_2 \vj + v_3 \vk\) in \(\R^3\) is the vector
where \(\theta\) is the angle between \(\vu\) and \(\vv\) and \(\vn\) is a unit vector perpendicular to both \(\vu\) and \(\vv\) as determined by the right-hand rule.
The magnitude \(\vecmag{\vu \times \vv}\) of the cross product of the vectors \(\vu\) and \(\vv\) gives the area of the parallelogram determined by \(\vu\) and \(\vv\text{.}\) Also, the scalar triple product \(|(\vu \times \vv) \cdot \vw |\) gives the volume of the parallelepiped determined by \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\text{.}\)
You are looking down at a map. A vector \(\bf{u}\) with \(\left| \mathbf{u} \right|\) = 9 points north and a vector \(\mathbf{v}\) with \(\left| \mathbf{v} \right|\) = 10 points northeast. The crossproduct \(\mathbf{u} \times \mathbf{v}\) points:
If \(\mathbf{a} = \mathbf{i} + 10 \mathbf{j} + \mathbf{k}\) and \(\mathbf{b} = \mathbf{i} + 16 \mathbf{j} + \mathbf{k}\text{,}\) find a unit vector with positive first coordinate orthogonal to both \(\mathbf{a}\) and \(\mathbf{b}\text{.}\)
Let \(A = \left(-3,4,1\right)\text{,}\)\(B = \left(2,-1,3\right)\text{,}\) and \(P = (k,k,k)\text{.}\) The vector from \(A\) to \(B\) is perpendicular to the vector from \(A\) to \(P\) when \(k\) = .
A bicycle pedal is pushed straight downwards by a foot with a 36 Newton force. The shaft of the pedal is 20 cm long. If the shaft is \(\pi / 5\) radians past horizontal, what is the magnitude of the torque about the point where the shaft is attached to the bicycle? Nm
Let \(\vu = 2\vi + \vj\) and \(\vv = \vi + 2\vj\) be vectors in \(\R^3\text{.}\)
Without doing any computations, find a unit vector that is orthogonal to both \(\vu\) and \(\vv\text{.}\) What does this tell you about the formula for \(\vu \times \vv\text{?}\)
Using the properties of the cross product and what you know about cross products involving the fundamental vectors \(\vi\) and \(\vj\text{,}\) compute \(\vu \times \vv\text{.}\)
Next, use the determinant version of Equation (9.4.1) to compute \(\vu \times \vv\text{.}\) Write one sentence that compares your results in (a), (b), and (c).
Observe that the area of \(\triangle PQR\) is half of the area of the parallelogram formed by \(\overrightarrow{PQ}\) and \(\overrightarrow{PR}\text{.}\) Hence find the area of \(\triangle PQR\text{.}\)
One of the properties of the cross product is that \((\vu+\vv) \times \vw = (\vu \times \vw) + (\vv \times \vw)\text{.}\) That is, the cross product distributes over vector addition on the right. Here we investigate whether the cross product distributes over vector addition on the left.
Let \(\vu = \langle 1,2,-1 \rangle\text{,}\)\(\vv = \langle 4,-3,6 \rangle\text{,}\) and \(\vw = \langle 4,7,2 \rangle\text{.}\) Calculate
Let \(\vu = \langle u_1, u_2, u_3 \rangle\text{,}\)\(\vv = \langle v_1, v_2, v_3 \rangle\text{,}\) and \(\vw = \langle w_1, w_2, w_3 \rangle\) be vectors in \(\R^3\text{.}\) In this exercise we investigate properties of the triple scalar product \((\vu \times \vv) \cdot \vw\text{.}\)
Show that \(\left|\begin{array}{ccc}
u_1 \amp u_2 \amp u_3 \\
v_1 \amp v_2 \amp v_3 \\
w_1 \amp w_2 \amp w_3
\end{array} \right| = -\left|\begin{array}{ccc}
v_1 \amp v_2 \amp v_3 \\
u_1 \amp u_2 \amp u_3 \\
w_1 \amp w_2 \amp w_3
\end{array} \right|\text{.}\) Conclude that interchanging the first two rows in a \(3 \times 3\) matrix changes the sign of the determinant. In general (although we won’t show it here), interchanging any two rows in a \(3 \times 3\) matrix changes the sign of the determinant.
Now suppose that \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) do not lie in a plane when they eminate from a common initial point.
Given that the parallepiped determined by \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) must have positive volume, what can we say about \((\vu \times \vv) \cdot \vw\text{?}\)
Explain how (i.) and (ii.) show that if \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) all eminate from the same initial point, then \(\vu\text{,}\)\(\vv\text{,}\) and \(\vw\) lie in the same plane if and only if \((\vu \times \vv) \cdot \vw = 0\text{.}\) This provides a straightforward computational method for determining when three vectors are co-planar.
In Subsection 9.4.3, we stated “Because the cross product works well with linear combinations, \(\vu\times\vv\) is perpendicular to any linear combination of \(\vu\) and \(\vv\text{.}\)” We want to verify this algebraically here. Specifically, show that \(\vu\times\vv\) will be orthogonal to any vector of the form \(a\vu+b\vv\text{.}\)